一.前言
AMD Kria K26 SOM是一种系统级模块,提供商业和工业级产品,采用小型卡形式配备定制Zynq UltraScale+ MPSoC器件,非常适合智能相机、嵌入式视觉及其它安全、零售分析、智慧城市和机器视觉应用的生产部署。它由K26 系统级模块 (SOM)、载卡和散热解决方案的非生产版本组成。SOM 非常紧凑,仅包含关键组件,例如基于 Zynq UltraScale+ MPSoC 的硅器件、存储器、引导和安全模块。
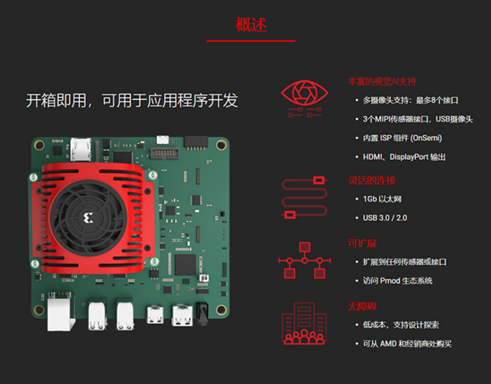
Kria KV260 Vision AI是Xilinx公司推出的一款视觉AI入门套件,旨在为客户提供一个平台来评估他们的目标应用程序并最终设计他们自己的带有K26 SOM的载卡。主要目标应用包括智慧城市、AI/ML计算、安全和未来的零售 。Kria KV260 Vision AI Starter Kit由K26系统级模块(SOM)、载卡和散热解决方案的非生产版本JSK1组成。SOM非常紧凑,仅包含关键组件,例如基于Zynq UltraScale+ MPSoC的硅器件、存储器、引导和安全模块。载卡允许多种接口选项,包括用于相机、显示器和PCI Express Gen3的接口。
作为用户的我们无需FPGA 开发经验或安装工具,就可快速启动智能相机以及其他经过硬件加速的应用程序。
二.开箱照片
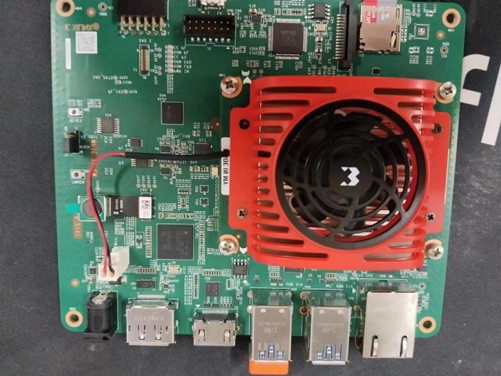
开发套件正面:
开发板背面:
帅气的外壳:
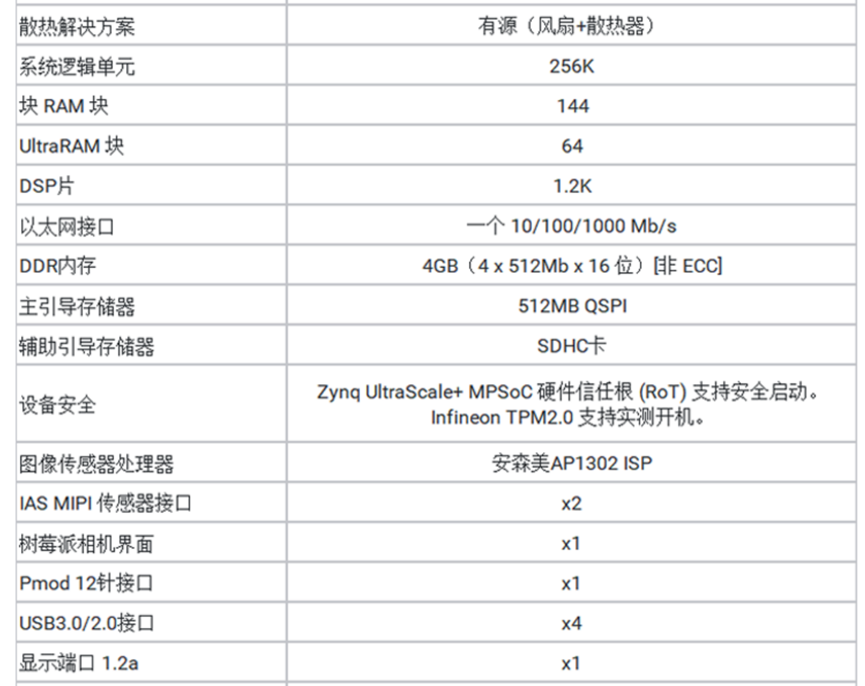
三.设备性能
1. SOM 基于 Zynq UltraScale+ MPSoC EV 架构并配备风扇和散热器的主动散热解决方案用于加速工业级机器人解决方案的开发,维护和商业化,同时使用自适应计算。
2.高达4 GB DDR4 内存。
3. Kria SOM还支持PYNQ,为嵌入式平台带来了Python生产力-MICRO-PYTHON
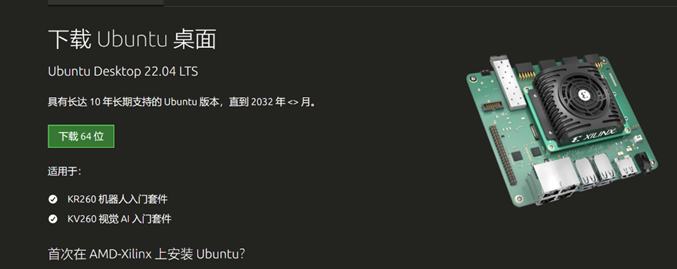
4. __除了支持PetaLinux和Yocto之外,Kria KV260和KR260还有一个经过认证的Ubuntu __22.04 LTS映像,运行 ROS 2 感知节点应用程序。
5. PYNQ 是 Xilinx 的一个开源项目,通过利用 Python 和 Jupyter 生态系统,使 Xilinx® 平台的使用更加容易。它可以很容易地安装在运行Ubuntu的KV260上,包括四种开源设计。PYNQ 以可组合叠加的形式为 Kria SOM 带来了动态功能交换 (DFX) 功能,因此用户可以在运行时直接在 PYNQ 环境中创建自己的自定义数据管道,而无需使用其他开发工具:时间多路复用部分或全部硬件设计比以往任何时候都更容易。
四.开发板接口
看到开发板这么小的身材,那么他究竟有什么能力呢,来看看开发板的资源。先看接口有个大概的映像!4个USB3.0接口,2个IAS MIPI摄像头接口,TF卡接口,1个以太网,1个 HDMI接口,一个DP接口。
5.使用体验
__ 我们本次使用的开发板KV260有一个经过认证的Ubuntu __22.04 LTS映像,通过https://ubuntu.com/download/amd-xilinx进行映像的下载。下载完成后,使用映像烧录工具balenaEtcher-Portable-1.18.9进行SD卡的初始映像烧录。
__ 烧录步骤:__
1.打开balenaEtcher-Portable-1.18.9.exe文件,

2.选择从文件烧录,打开下载好的文件iot-limerick-kria-classic-desktop-2204-x07-20230302-63.img,同时使用读卡器将SD卡连接到电脑。选择好SD卡对应的目标磁盘进行映像烧录。

3.等待映像烧录完成,将SD卡从读卡器中取下并将SD卡插入KV260开发板的SD卡槽中,上电,连接显示屏,我们就进入了Ubuntu 桌面,第一次开机的默认密码是ubuntu,再次开机后,我们需要进行密码的设定。
4.安装系统管理所需的 xlnx 配置快照:
sudo snap install xlnx-config --classic --channel=2.x
运行 xlnx-config.sysinit 命令以安装 Kria 特定的 PPA,该 PPA 也将运行 apt update 和 apt 升级 - 出现提示时接受所有默认值:
sudo xlnx-config.sysinit
5.在KV260上使用Kria Robotics Stack(KRS)
a.前期编译操作步骤如下
$ cd ~/krs_ws # head to your KRS workspace
# prepare the environment
$ source /tools/Xilinx/Vitis/2021.2/settings64.sh # source Xilinx tools
$ source /opt/ros/rolling/setup.bash # Sources system ROS 2 installation
export PATH="/usr/bin":PATH # FIXME: adjust path for CMake 3.5+
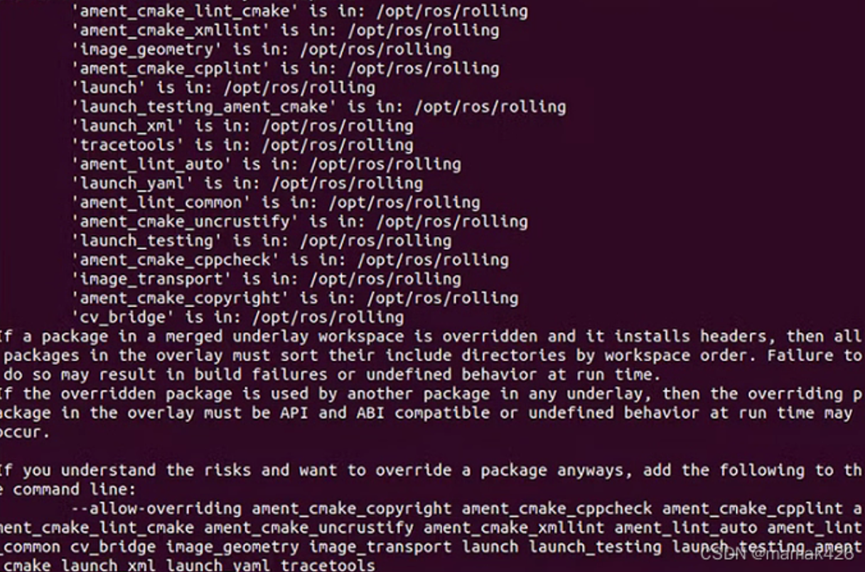
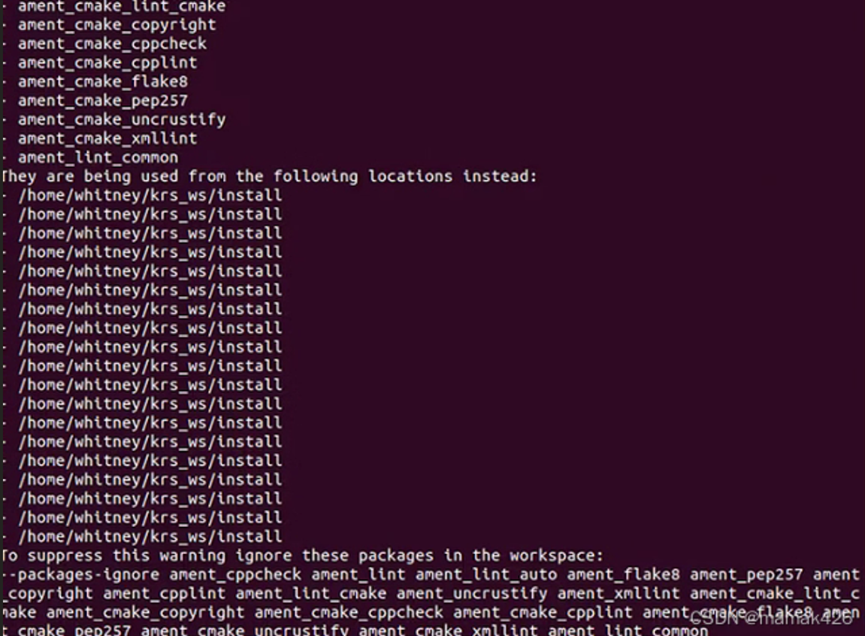
# build the workspace
__$ colcon build --merge-install # __
# source the workspace as an overlay
$ source install/setup.bash
b.编译过程如上以上完成基本编译。
c. 编译kv260镜像
$ colcon acceleration select kv260
d.判断是否成功启用

有输出kv260*,说明对了。
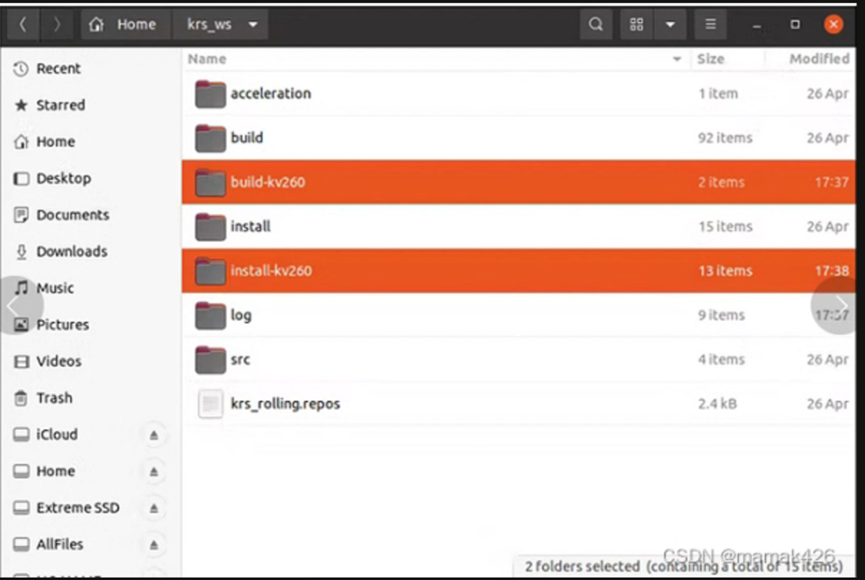
e.生成kv260包
__$ colcon build --build-base=build-kv260 --install-base=install-kv260 --merge-install --mixin kv260 --packages-select publisher_xilinx__
f.打包过程
g.生成可在kv260直接运行的镜像:
$ colcon acceleration linux vanilla --install-dir install-kv260
__ 官方明示:~/krs_ws/acceleration/firmware/select/sd_card.img路径下的就是可在kv260上执行的镜像。__

 电子发烧友论坛
电子发烧友论坛 /6
/6 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号




 986
986













 淘帖
淘帖



