大佬们好,分享一下我用鲁班猫做ros主控,stm32f407做底层驱动的一个ros小车。
目的是识别烟雾并净化:净化是用的负离子发生器(效果如文章顶部视频,净化还是很顶的),外加扇叶将其扩散出去。同时也具有环境气体浓度(质量)检测的功能。
b站链接:
https://www.bilibili.com/video/BV1hh4y1n7Fz/?vd_source=4fa660ff7e4423139e6ebdbd4dece6c7
这是我去年12月底开始做的,入坑鲁班猫算是比较早了。在读大三学生。正奥里给考研中。。。
最底下还塞了一块vet6和一块esp32.

板子上加了个风扇,为了散热快。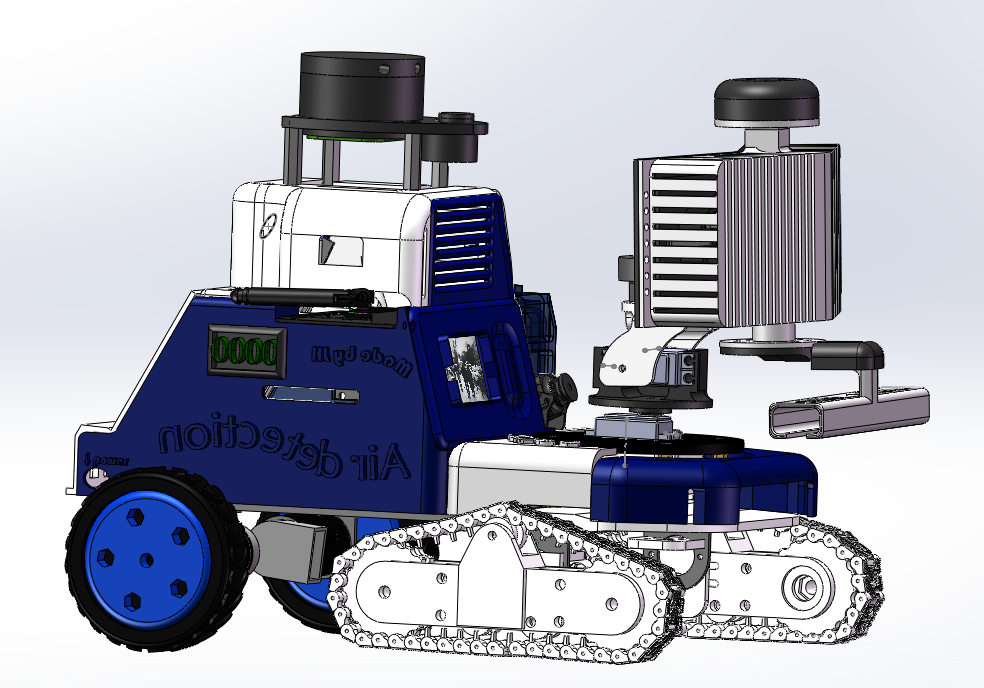


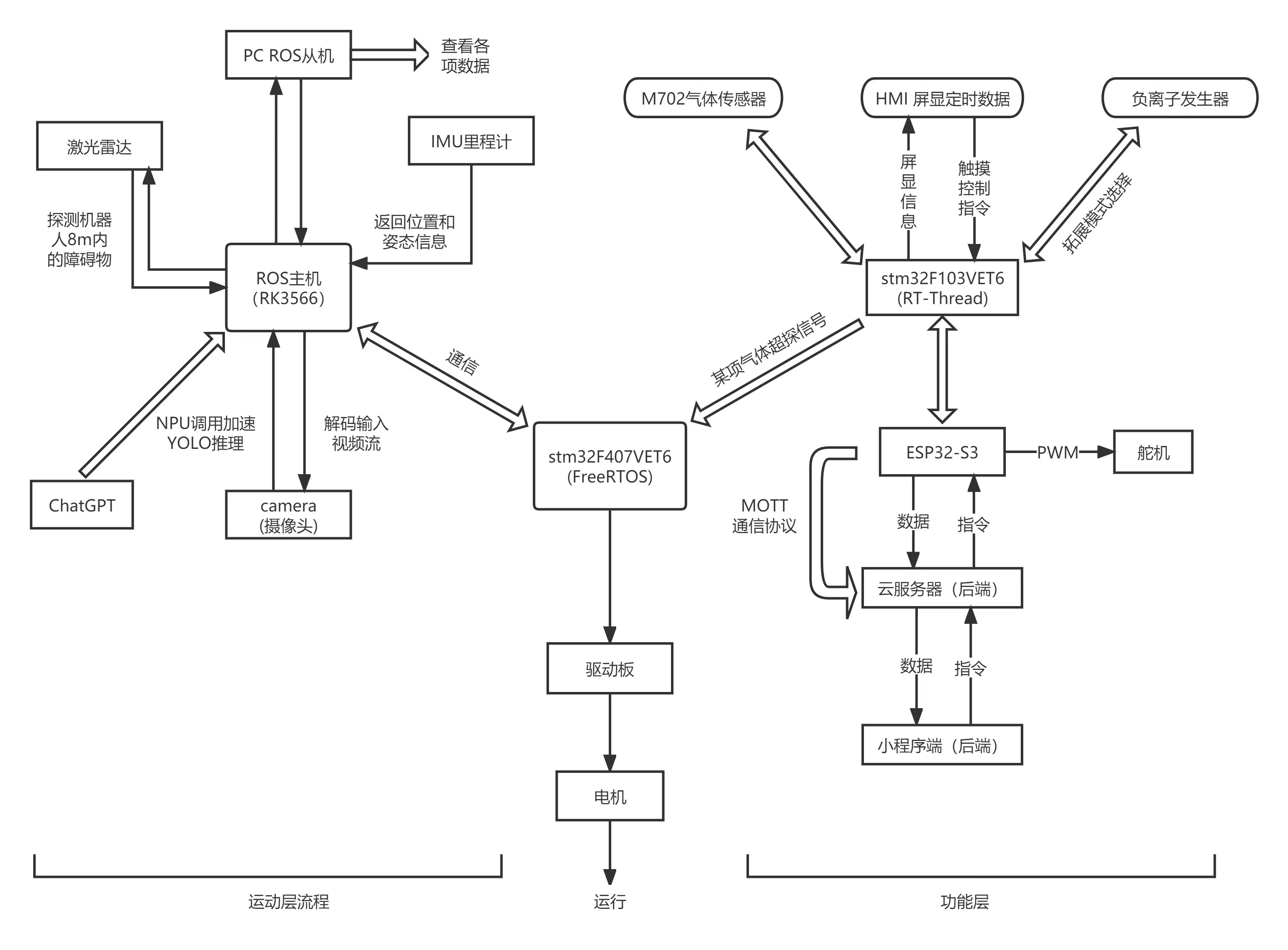
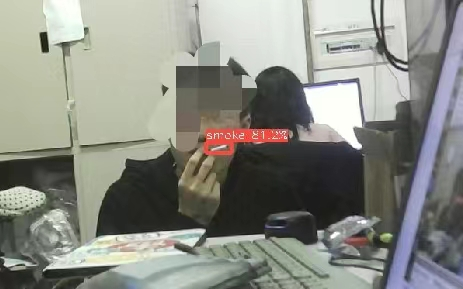
鲁班猫1s做ROS主控用于ros建图(gmapping)和导航,同时接入NPU做抽烟监测,模型是yolov5自己训练的模型转化成rknn部署在板子上。
功能部分即功能层的stm32与串口屏、esp32通信部分。功能层的主要目的是获取传感器数据和通过继电器控制小车前端的负离子发生器和两个加快负离子扩散的风扇。这里的stm32相当于一个中转,用的是rt—thread实时操作系统,版本是4.0.2(写的比较早,当时的rtt还有小bug,现在已经很好用了。)
开启三个串口:一个用于读取传感器,一个用于接收和发送指令给串口屏,一个用于给esp32传输数据,通过esp32将数据发送到巴法云平台,做接入小程序中转。
篇幅有限,代码放在了网盘上。
链接:https://pan.baidu.com/s/1ltgypPMq9heezk412r4IKw?pwd=jhzs
提取码:jhzs
因为用的是rtt,移植性很高,故只写了应用层的main.c函数。如下:
气体传感器如下(所用的是串口协议)

#include <rtthread.h>
/ *串口1用来调试* /
#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>
#include <string.h>
#include <serial.h>
#include <stdio.h>
#include "stdlib.h"
#define left_motor_run {rt_pin_write(6,PIN_LOW );rt_pin_write(7,PIN_HIGH);}
#define left_motor_back {rt_pin_write(6,PIN_HIGH );rt_pin_write(7,PIN_LOW);}
#define stoping {rt_pin_write(6,PIN_HIGH );rt_pin_write(7,PIN_HIGH);rt_pin_write(16,PIN_HIGH );rt_pin_write(17,PIN_HIGH);}
#define right_motor_run {rt_pin_write(16,PIN_LOW );rt_pin_write(17,PIN_HIGH);}
#define right_motor_back {rt_pin_write(16,PIN_HIGH );rt_pin_write(17,PIN_LOW);}
#define key1_open rt_pin_write(51,PIN_LOW );
#define key1_close rt_pin_write(51,PIN_HIGH );
#define key2_open rt_pin_write(52,PIN_LOW );
#define key2_close rt_pin_write(52,PIN_HIGH );
#define key3_open rt_pin_write(53,PIN_LOW );
#define key3_close rt_pin_write(53,PIN_HIGH );
/ *串口2的变量 115200* /
struct serial_configure uar2_configs = RT_SERIAL_CONFIG_DEFAULT;
rt_sem_t sem2;
rt_device_t uar2_dev;
rt_thread_t uar_2_th;
rt_thread_t uar_2_deal;
char buffer[128] = {0};
rt_size_t rxlen2 = 0;
/ *串口3的变量 9600* /
struct serial_configure uar3_configs = MY_SERIAL_CONFIG_DEFAULT;
rt_sem_t sem3;
rt_device_t uar3_dev;
rt_thread_t uar_3_th;
uint8_t buffer3[17] = {0};
rt_size_t rxlen3 = 0;
/ *串口4的变量 115200* /
struct serial_configure uar4_configs = RT_SERIAL_CONFIG_DEFAULT;
rt_sem_t sem4;
rt_device_t uar4_dev;
rt_thread_t uar_4_th;
rt_uint8_t buffer4[256] = {0xff};
rt_size_t rxlen4 = 0;
rt_uint8_t deal ;
char wheater[8];
char humidity[4];
char temperature[4];
char wind_speed[4];
char shi[3];
char miao[3];
char fen[3];
char wheater_deal[23]="main2.g3.txt="";
char humidity_deal[18]="main2.g1.txt="";
char temperature_deal[17]="main2.g0.txt="";
char wind_speed_deal[19]="main2.g2.txt="";
char shi_deal[15] = "main.z1.val=";
char miao_deal[15] = "main.z0.val=";
char fen_deal[15] = "main.z2.val=";
char end[2]=""";
char xf_end[3];
void uar2_thread_entry(void *parameter)
{
rt_size_t len = 0;
rt_device_write(uar4_dev,0,ch2o_date,sizeof(ch2o_date));
rt_device_write(uar4_dev,0 ,xf_end,sizeof(xf_end));
rt_device_write(uar4_dev,0 ,tvoc_date,sizeof(tvoc_date));
rt_device_write(uar4_dev,0 ,xf_end,sizeof(xf_end));
rt_device_write(uar4_dev,0 ,pm2_5_date,sizeof(pm2_5_date));
rt_device_write(uar4_dev,0 ,xf_end,sizeof(xf_end));
rt_device_write(uar4_dev,0 ,pm10_date,sizeof(pm10_date));
rt_device_write(uar4_dev,0 ,xf_end,sizeof(xf_end));
rt_device_write(uar4_dev,0,temp_date,sizeof(temp_date));
rt_device_write(uar4_dev,0 ,xf_end,sizeof(xf_end));
rt_device_write(uar4_dev,0,humi_date,sizeof(humi_date));
rt_device_write(uar4_dev,0 ,xf_end,sizeof(xf_end));
memset(buffer4, 0, sizeof buffer4);
}
}
rt_err_t uar3_rxback(rt_device_t dev, rt_size_t size)
{
rxlen3 = size;
rt_sem_release(sem3);
return RT_EOK;
}
void uar4_thread_entry(void *parameter)
{
rt_size_t len = 0;
while(1)
{
rt_sem_take(sem4, RT_WAITING_FOREVER);
len = rt_device_read(uar4_dev, 0, buffer4, rxlen4);
buffer4[len] = '\0';
rt_kprintf("%c\n",len);
if (buffer4[0] == 0x02) {
deal=0x02;
rt_device_write(uar2_dev,0 ,&deal,16);
rt_kprintf("uart4");
deal=0;
}
if (buffer4[0] == 0x01) {
deal=0x01;
rt_device_write(uar2_dev,0 ,&deal,16);
rt_kprintf("uart4");
deal=0;
}
if (buffer4[0] == 0x03) {
deal=0x03;
rt_device_write(uar2_dev,0 ,&deal,16);
rt_kprintf("uart4");
deal=0;
}
switch(buffer4[0])
{
case 0x44: key1_open; break;
case 0x55: key1_close; break;
case 0x66: key2_open; break;
case 0x77: key2_close; break;
case 0x88: key3_open; break;
case 0x99: key3_close; break;
}
}
}
rt_err_t uar4_rxback(rt_device_t dev, rt_size_t size)
{
rxlen4 = size;
rt_sem_release(sem4);
return RT_EOK;
}
void clearmachine_and_motor_pin_init()
{
rt_pin_mode(6,PIN_MODE_OUTPUT );
rt_pin_mode(7,PIN_MODE_OUTPUT );
rt_pin_mode(16,PIN_MODE_OUTPUT );
rt_pin_mode(17,PIN_MODE_OUTPUT );
rt_pin_mode(28, PIN_MODE_INPUT);
rt_pin_mode(29,PIN_MODE_INPUT);
rt_pin_mode(51,PIN_MODE_OUTPUT );
rt_pin_mode(52,PIN_MODE_OUTPUT );
rt_pin_mode(53,PIN_MODE_OUTPUT );
key1_close;
key2_close;
key3_close;
}
int main(void)
{
clearmachine_and_motor_pin_init();
uar2_dev = rt_device_find("uart2");
if (uar2_dev == NULL) {
LOG_E("rt_device_find[uart2] FAILED...\\\\n");
return -EINVAL;
}
rt_device_open(uar2_dev, RT_DEVICE_OFLAG_RDWR | RT_DEVICE_FLAG_DMA_RX);
rt_device_control(uar2_dev, RT_DEVICE_CTRL_CONFIG, (void *)&uar2_configs);
rt_device_set_rx_indicate(uar2_dev, uar2_rxback);
uar_2_th = rt_thread_create("uar2_rx_thread", uar2_thread_entry, NULL, 4096, 10, 5);
rt_thread_startup(uar_2_th);
sem2 = rt_sem_create("sem2", 1, RT_IPC_FLAG_FIFO);
if(sem2 == RT_NULL){
LOG_E("sem2 rt_sem_create failed...\\\\n");
return -ENOMEM;
}
LOG_D("sem2 rt_sem_create successed...\\\\n");
uar3_dev = rt_device_find("uart3");
if (uar3_dev == NULL) {
LOG_E("rt_device_find[uart3] FAILED...\\\\n");
return -EINVAL;
}
rt_device_open(uar3_dev, RT_DEVICE_OFLAG_RDWR | RT_DEVICE_FLAG_DMA_RX);
rt_device_control(uar3_dev, RT_DEVICE_CTRL_CONFIG, (void *)&uar3_configs);
rt_device_set_rx_indicate(uar3_dev, uar3_rxback);
uar_3_th = rt_thread_create("uar3_rx_thread", uar3_thread_entry, NULL, 4096, 12, 5);
rt_thread_startup(uar_3_th);
sem3 = rt_sem_create("sem3", 1, RT_IPC_FLAG_FIFO);
if(sem3 == RT_NULL){
LOG_E("sem3 rt_sem_create failed...\\\\n");
return -ENOMEM;
}
LOG_D("sem3 rt_sem_create successed...\\\\n");
uar4_dev = rt_device_find("uart4");
if (uar4_dev == NULL) {
LOG_E("rt_device_find[uart4] FAILED...\\\\n");
return -EINVAL;
}
rt_device_open(uar4_dev, RT_DEVICE_OFLAG_RDWR | RT_DEVICE_FLAG_DMA_RX);
rt_device_control(uar4_dev, RT_DEVICE_CTRL_CONFIG, (void *)&uar4_configs);
rt_device_set_rx_indicate(uar4_dev, uar4_rxback);
uar_4_th = rt_thread_create("uar4_rx_thread", uar4_thread_entry, NULL, 4096, 11, 5);
rt_thread_startup(uar_4_th);
sem4 = rt_sem_create("sem4", 4, RT_IPC_FLAG_FIFO);
if(sem4 == RT_NULL){
LOG_E("sem4 rt_sem_create failed...\\\\n");
return -ENOMEM;
}
LOG_D("sem4 rt_sem_create successed...\\\\n");
return RT_EOK;
}
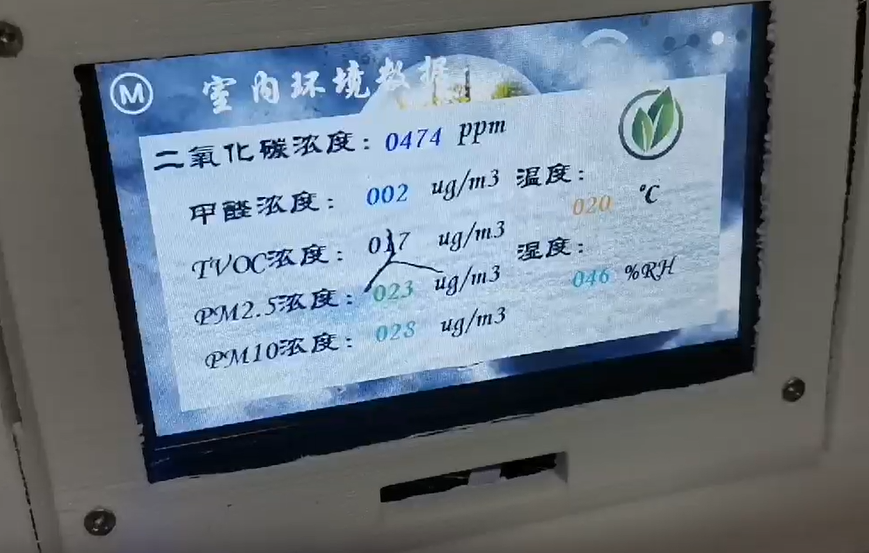
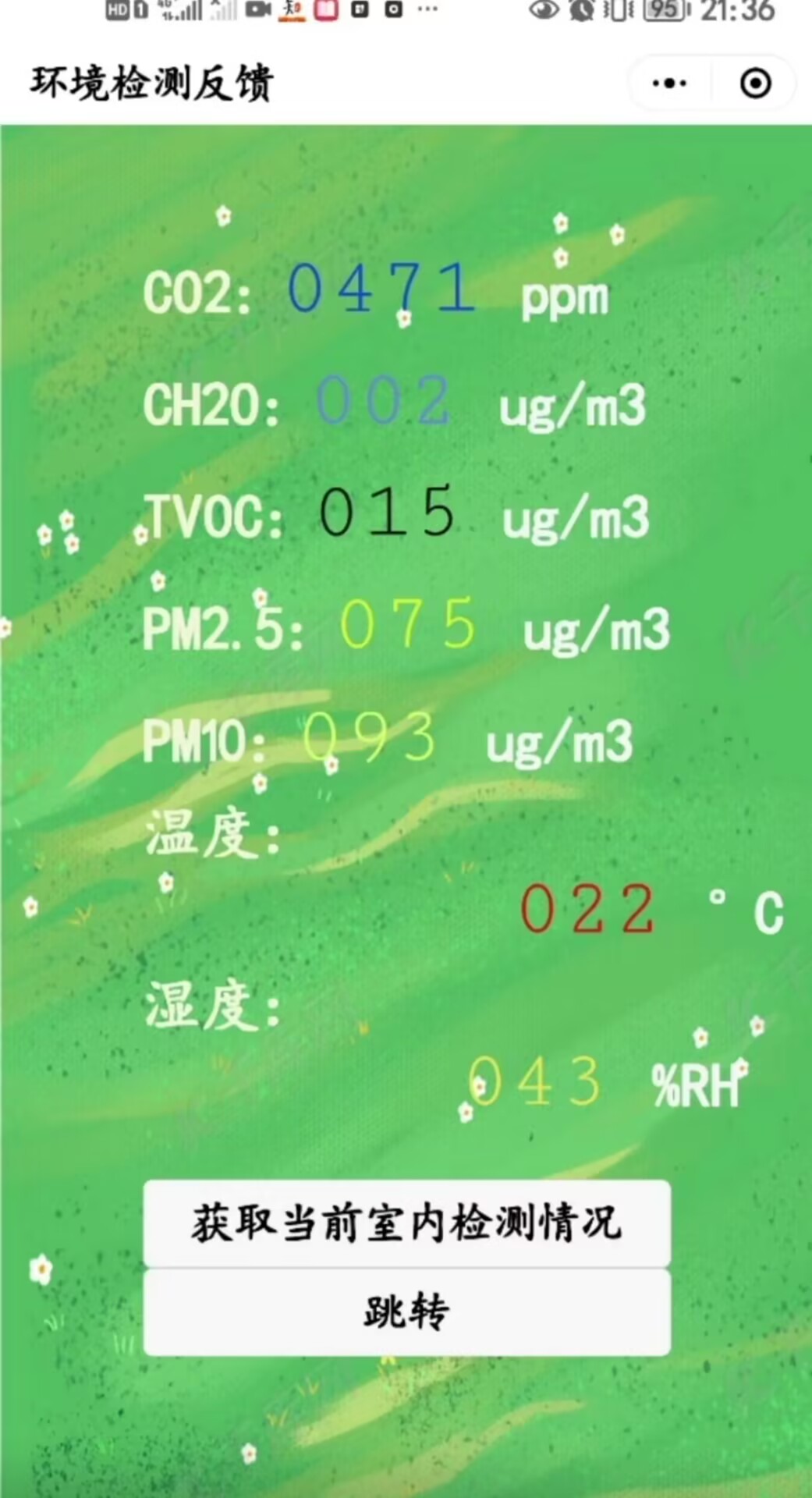
最后是串口屏显示,同时数据也能在微信小程序上查看
接下来是鲁班猫1s做ros主控的部分。
1、移植轮趣大佬的ros源码:
根据我现有的硬件:思岚a1雷达、一个usb rgb摄像头选择合适的功能包,然后开始移植。
中途会出现很多错误。例如缺少部分功能包,sudo apt install ros-noetic-(包名)【我的ros版本是noetic】。
2、移植完毕后发现大佬们并没有使用鲁班猫上的npu。所以我尝试了用npu跑yolov5在debain10的环境下用python接口效果如下:
Python与c++接口将图片监测改成实时摄像头的代码:
只需更改cv.Capture()函数的摄像头设备号即可。
链接:https://pan.baidu.com/s/1gauOezF-X8ZuvU4b0I4v4A?pwd=jhzs
提取码:jhzs
Python接口的yolov7只需更改yolov5代码的锚点即可
以下只列出主函数部分,完整的在链接里。
import urllib
import time
import sys
import numpy as np
import cv2
from rknnlite.api import RKNNLite
#from PIL import Image
RKNN_MODEL = 'mask.rknn'
IMG_PATH = './test.jpg'
OBJ_THRESH = 0.25
NMS_THRESH = 0.45
IMG_SIZE = 640
......(省略中间部分)
if __name__ == '__main__':
# Create RKNN object
rknn = RKNNLite()
# init runtime environment
print('--> Load RKNN model')
ret = rknn.load_rknn(RKNN_MODEL)
#ret = rknn.init_runtime(target='rv1126', device_id='256fca8144d3b5af')
if ret != 0:
print('Load RKNN model failed')
exit(ret)
print('done')
ret = rknn.init_runtime()
if ret != 0:
print('Init runtime environment failed!')
exit(ret)
print('done')
capture = cv2.VideoCapture(9)
ref, frame = capture.read()
if not ref:
raise ValueError("error reading")
fps = 0.0
while(True):
t1 = time.time()
#
ref, frame = capture.read()
if not ref:
break
# BGRtoRGB
frame = cv2.cvtColor(frame,cv2.COLOR_BGR2RGB)
#############
img = frame
img, ratio, (dw, dh) = letterbox(img, new_shape=(IMG_SIZE, IMG_SIZE))
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# Inference
print('--> Running model')
outputs = rknn.inference(inputs=[img])
input0_data = outputs[0]
input1_data = outputs[1]
input2_data = outputs[2]
input0_data = input0_data.reshape([3, -1]+list(input0_data.shape[-2:]))
input1_data = input1_data.reshape([3, -1]+list(input1_data.shape[-2:]))
input2_data = input2_data.reshape([3, -1]+list(input2_data.shape[-2:]))
input_data = list()
input_data.append(np.transpose(input0_data, (2, 3, 0, 1)))
input_data.append(np.transpose(input1_data, (2, 3, 0, 1)))
input_data.append(np.transpose(input2_data, (2, 3, 0, 1)))
boxes, classes, scores = yolov5_post_process(input_data)
img_1 = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)
#img_1 = img_1[:,:,::-1]
if boxes is not None:
draw(img_1, boxes, scores, classes)
fps = ( fps + (1./(time.time()-t1)) ) / 2
print("fps= %.2f"%(fps))
#img_1 = cv2.putText(frame, "fps= %.2f"%(fps), (0, 40), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow("video",img_1[:,:,::-1])
c= cv2.waitKey(1) & 0xff
if c==27:
capture.release()
break
print("Video Detection Done!")
capture.release()
cv2.destroyAllWindows()
但这还没有接到ros中,为此我去翻rknn的github找到了接入ros的方法。
Ros功能包如下:
Launch文件:
Yolov5.launch
<param name="model_file" value="yolov5s-640-640.rknn"/>
<param name="display_output" value="$(arg display_output)"/>
<param name="prob_threshold" value="0.35"/>
<param name="chip_type" value="$(arg chip_type)"/>
<remap from="/camera/image_raw" to="$(arg camera_topic)"/>
Camrea.Launch
<param name="video_device" value="/dev/$(arg device)" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="framerate" value="30" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usn_cam" />
<param name="io_method" value="mmap"/>
<param name="camera_name" value="usn_cam"/>
启动摄像头
默认的摄像头设备号为video0 鲁班猫为video9
1、roslaunch rknn_ros camera.launch
2、roslaunch rknn_ros camera.launch device:=video9(可传参或者改launch)
3、roslaunch rknn_ros yolov5.launch chip_type:=RK3566
链接:
链接:https://pan.baidu.com/s/1QhfRjDs1sftAB0Q-TS5dBA?pwd=jhzs
提取码:jhzs
不出意外改好板子型号和对应的video就能用了。
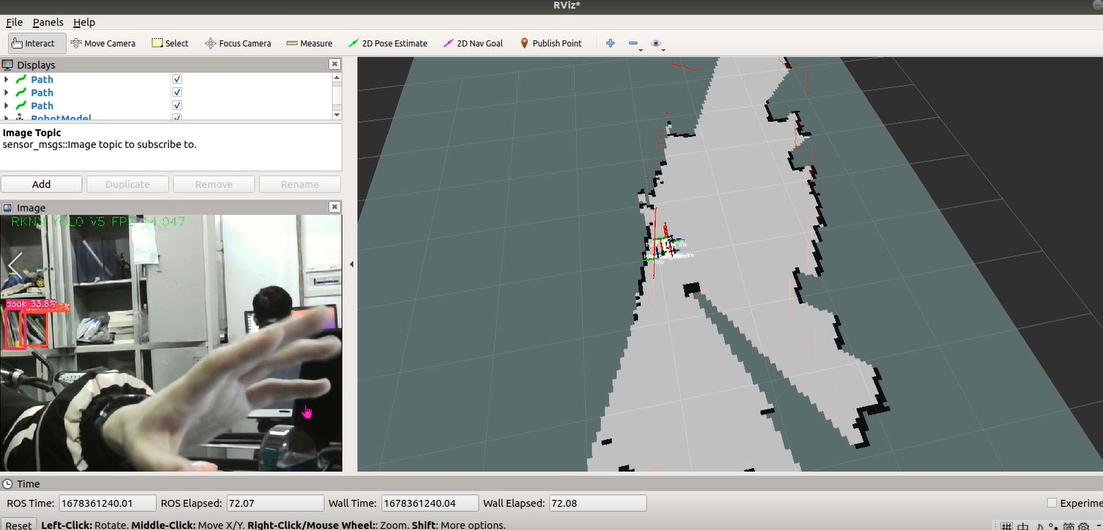
可打开rviz或者rqt_image_view查看。
模型是我自己训练的,链接如下:
链接:https://pan.baidu.com/s/1FSJyW6kp4cy3-yakTq_Q4g?pwd=jhzs
提取码:jhzs
YOLOV5配置和使用:
官方的源码是不建议的:
用这个:
https://gitcode.net/mirrors/airockchip/yolov5?utm_source=csdn_github_accelerator
这是瑞芯微官方推荐的源码,但是也需要更改。
yolov5-master\models下的yolo.py
找到
def forward(self, x):
函数,更改为:
def forward(self, x):
z = [] # inference output
for i in range(self.nl):
if os.getenv('RKNN_model_hack', '0') != '0':
z.append(torch.sigmoid(self.m[i](x[i])))
continue
x[i] = self.m[i](x[i]) # conv
'''
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
y = x[i].sigmoid()
if self.inplace:
y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xy
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
else: # for YOLOv5 on AWS Inferentia https:
xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy
wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
y = torch.cat((xy, wh, conf), 4)
z.append(y.view(bs, -1, self.no))
if os.getenv('RKNN_model_hack', '0') != '0':
return z
return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
'''
return x[0],x[1],x[2]
这样就可以在pt权重转onnx时去掉最后一个Detect层。
pt转onnx指令
python export.py --weights yolov5s.pt --img 640 --batch 1 --opset 11 --include onnx
红色字体部分换成要转换的权重文件例如我的就是:
**python export.py --weights ** **weights/best.pt ** --img 640 --batch 1 --opset 11 --include onnx
opset选择11。
这样出来的模型是有三个节点的模型,才是可用的。
可用netron查看:
netron:https://netron.app/(浏览器网址)
将模型拖到页面可查看。
有三个输出节点。
且要记好三个节点的名字。
在官方要求的ubuntu pc端上进行模型转换。
我这里有个改好的yolov5源码(里面是我训练的抽烟监测模型)
网盘链接如下:
链接:https://pan.baidu.com/s/1fXKNoXhu4m1SmTr4fc-afg?pwd=jhzs
提取码:jhzs
Chatgpt部分是b站机器人阿杰github开源项目。
https://www.bilibili.com/video/BV12M4y1R76M/?spm_id_from=333.788
效果如图:
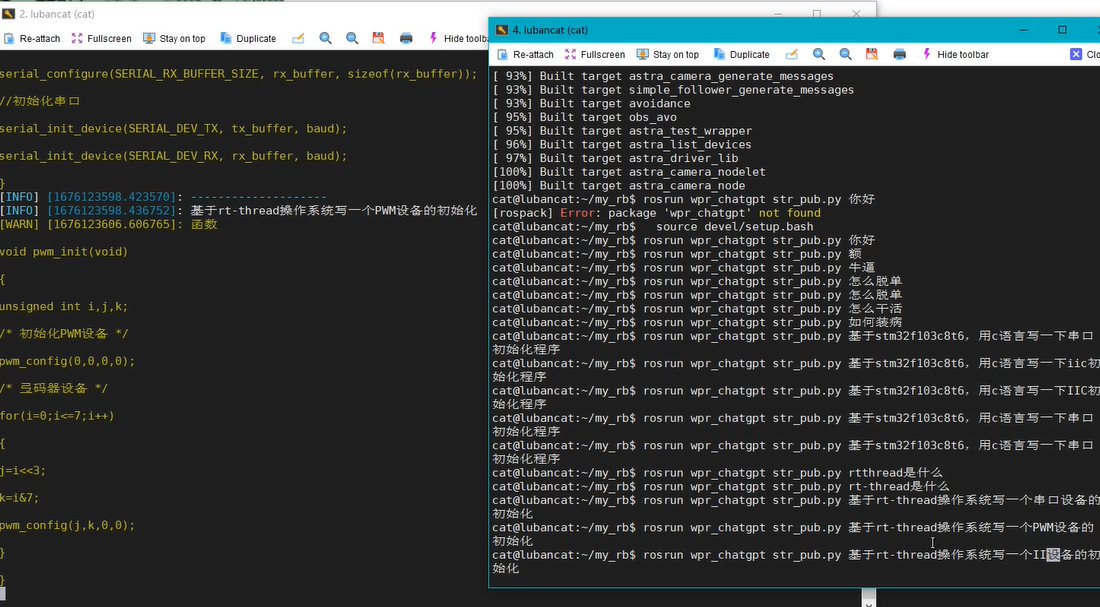
呜。。。不要看问得什么
整车的sw模型链接:soildwork2020及以上版本可直接打开
链接:https://pan.baidu.com/s/1KqB1SOD418dCvyDaZFMgpg?pwd=jhzs
提取码:jhzs
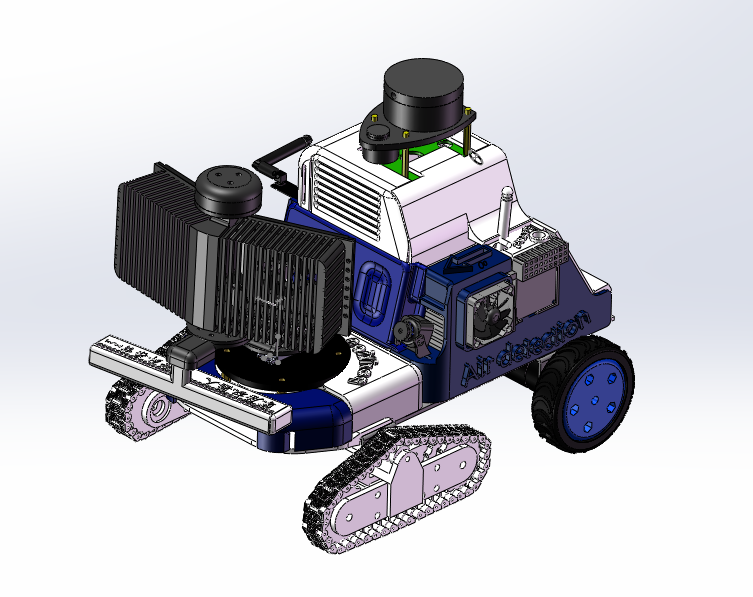
当时还理想化的撸了个履带,可后来发现打印出来根本用不了,故放弃,换成了轮子。
放链接是希望能够帮到像我一样步步踩坑的菜鸟级选手。我是老踩坑怪了。
有不当的地方,还望大佬们海涵。

 电子发烧友论坛
电子发烧友论坛 /6
/6 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号



















 淘帖
淘帖 679
679





